Manufacturing Automation - short answer type questions from AMIE exams (Summer 2018)
Define a resolution of a robot.
- The resolution of a robot is a feature determined by the design of the control unit and is mainly dependent on the position feedback sensor.
- It is important to distinguish the programming resolution from the control resolution. The programming resolution is the smallest allowable position increment in robot programs and is referred to as the basic resolution unit (BRU).
- The control resolution is the smallest change in position that the feedback device can sense.
Transfer machine
Transfer machines are metalworking machine tools with several stations for performing various machining processes. Workpieces are fed into the machine and automatically indexed from station to station. Each station simultaneously performs a different operation on the workpiece and they exit the machine as a partially or completely finished unit.
Name any two types of FMS layouts.
- Sequential FMS: It manufactures a one-piece part batch type and then planning and preparation is carried out for the next piece part batch type to be manufactured. It operates like a small batch flexible transfer line.
- Random FMS: It manufactures any random mix of piece part types at any one time.
- Dedicated FMS: It continually manufactures, for extended periods, the same but limited mix of piece part batch types.
- Engineered FMS: It manufactures the same mix of part types throughout its lifetime.
- Modular FMS: A modular FMS, with a sophisticated FMS host, enables FMS users to expand their FMS capabilities in a stepwise fashion into any of the previous four types of FMS.
Define Detroit automation.
- When companies began to replace scrapped or obsolete bine with those employing the latest technological advances, gave Up what eventually became known as Detroit automation, e.g. inline sequencing of manufacturing operations that utilized automatic material handling techniques.
- Automation transformed the automobile industry. Sequences of different machining operations could be carried out on a single platform and to higher tolerances and higher speeds than previous.
- Detroit automation has started from the automobile industry.
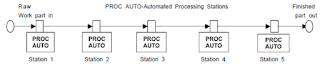
- An automated flow line consists of several machines or workstations which are linked together by work handling devices that transfer parts between the stations. The transfer of work parts occurs automatically and the workstations carry out their specialized functions automatically.
- The flow line can be symbolized as shown in the following figure.
BLU
- It is a Basic Length Unit (BLU).
- In an NC machine, the displacement length per one pulse output from the machine is defined as a Basic Length Unit (BLU).
- In the CNC computer, each bit (binary digit) represents 1 BLU.
- Bit = BLU
- Example: If one pulse makes a servo motor rotates by one degree and the servo motor moves the table by 0.0001 mm, one BLU will be 0.0001 mm.
- The lead of a ball screw is related to the displacement unit of the machine tool table.
Explain the term manufacturing lead time.
Lead time is the latency between the initiation and completion of a process. For example, the lead time between the placement of an order and delivery of new cars by a given manufacturer might be between 2 weeks and 6 months, depending on various particularities.
Name two types of CMM construction.
- Bridge Type CMM Bridge style designs provide very stable anchors for the measuring apparatus. They are available as both fixed machines and as portable units. Unlike laboratory machines, these are usually hardened to stand up to the rigors of the machine shop floor. However, bridge style CMMs are often limited to measuring small and medium-sized parts which can be lifted and placed on the table.
- Gantry Type CMM Gantry-style CMMs are used for large products such are automobiles where the floor itself can serve as a datum. These designs eliminate the need to lift an article onto a table, so they are useful for heavy machine parts. Their enormous size makes them much more expensive than the other styles, but their utility makes them critical for machine shops that churn out large and hefty parts.
What are the types of grippers used in industrial robots?
- Column type: This is mostly known as a universal measuring machine. due to high accuracy output, this is mostly used.
- Cantilever type In this type of measuring machine long length products can measure easily and it required less space.
- Bridge type The shape itself explains the construction. this is mostly used in bulk manufacturing industries, it is one of the fast measuring machines with accurate.
Enumerate some non-optical inspection methods.
- Non-Contact Systems: 3D Vision Systems, CT Scanner, Laser Scanner, Articulating Laser Scanning Arms, Photogrammetry, Structured Light Scanners, LiDAR Range Scanners, 2D & 3D Microscopes, and CFS Sensor Systems
- Contact Systems: CMMs, Hard Probe Articulating Arms, Gage Pin sets, Callipers, Gage Blocks, Height Gages, Surface Plates, Micrometres and Roundness Testers.
Machine vision
- Machine vision (MV) is the technology and methods used to provide imaging-based automatic inspection and analysis for such applications as automatic inspection, process control, and robot guidance, usually in industry.
- A machine vision system will work tirelessly performing 100% online inspection, resulting in improved product quality, higher yields and lower production costs. Consistent product appearance and quality drives customer satisfaction and ultimately market share.
- A machine vision system consists of several critical components, from the sensor (camera) that captures a picture for inspection, to the processing engine itself (vision appliance) that renders and communicates the result.
---
- The study material for AMIE/B Tech/Junior Engineer exams is available at https://amiestudycircle.com
- If you like the post please share your thoughts in the comment section



Comments